Welcome to Aurora ROS2 SDK
Aurora是SLAMTEC公司全新打造的融合激光、视觉、惯导和深度学习技术,一体化定位与建图感知传感器。该传感器无需外部依赖,开机即可实现室内外三维高精建图机提供六自由度定位能力。
Get Started
下载和安装SDK
请在思岚科技官方网站上的支持与下载页面下载适合您的平台的ROS2 SDK并解压至本地。
目录结构
Aurora ROS2 SDK包含了您开发过程中可能会用到的资源、代码,其目录结构组织如下:
| 目录 | 说明 |
|---|---|
| docs | 参考文档 |
| src | 源码 |
| --slamware_ros_sdk | ROS SDK源码包 |
| --aurora_remote_public | Aurora相关头文件与库文件 |
开发环境需求
基于Ubuntu 20.04 / 22.04操作系统,并装有ROS2软件包。
硬件需求
为使用ROS2 SDK,您需要一台基于Auraro空间建图设备,开启并配置合适的IP地址。slamware_ros_sdk_server_node节点启动后将尝试连接该设备。
Hello World
1. 创建工作空间
将存放源码的src放入一个空的工作目录,详情见:ROS2 官方工作空间创建教程
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
2. 编译
cd ..
colcon build
3. 配置工作空间系统环境
source install/setup.bash
为了每次启动终端时自动加载环境: 将以下命令添加到 ~/.bashrc 中
echo "source ~/ros2_ws/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
由于aurora_remote_public lib为动态库,因此需要将所用平台路径加入到LD_LIBRARY_PATH中,如将aurora_ros2_sdk_linux放置在~/ros2_ws/src文件夹下,需要将以下命令添加到 ~/.bashrc 中
export LD_LIBRARY_PATH=~/ros2_ws/src/aurora_ros2_sdk_linux/src/aurora_remote_public/lib/linux_x86_64:$LD_LIBRARY_PATH
4. 启动节点
若Aurora设备处于AP模式,连接Aurora WIFI,启动节点
ros2 launch slamware_ros_sdk slamware_ros_sdk_server_and_view.xml ip_address:=192.168.11.
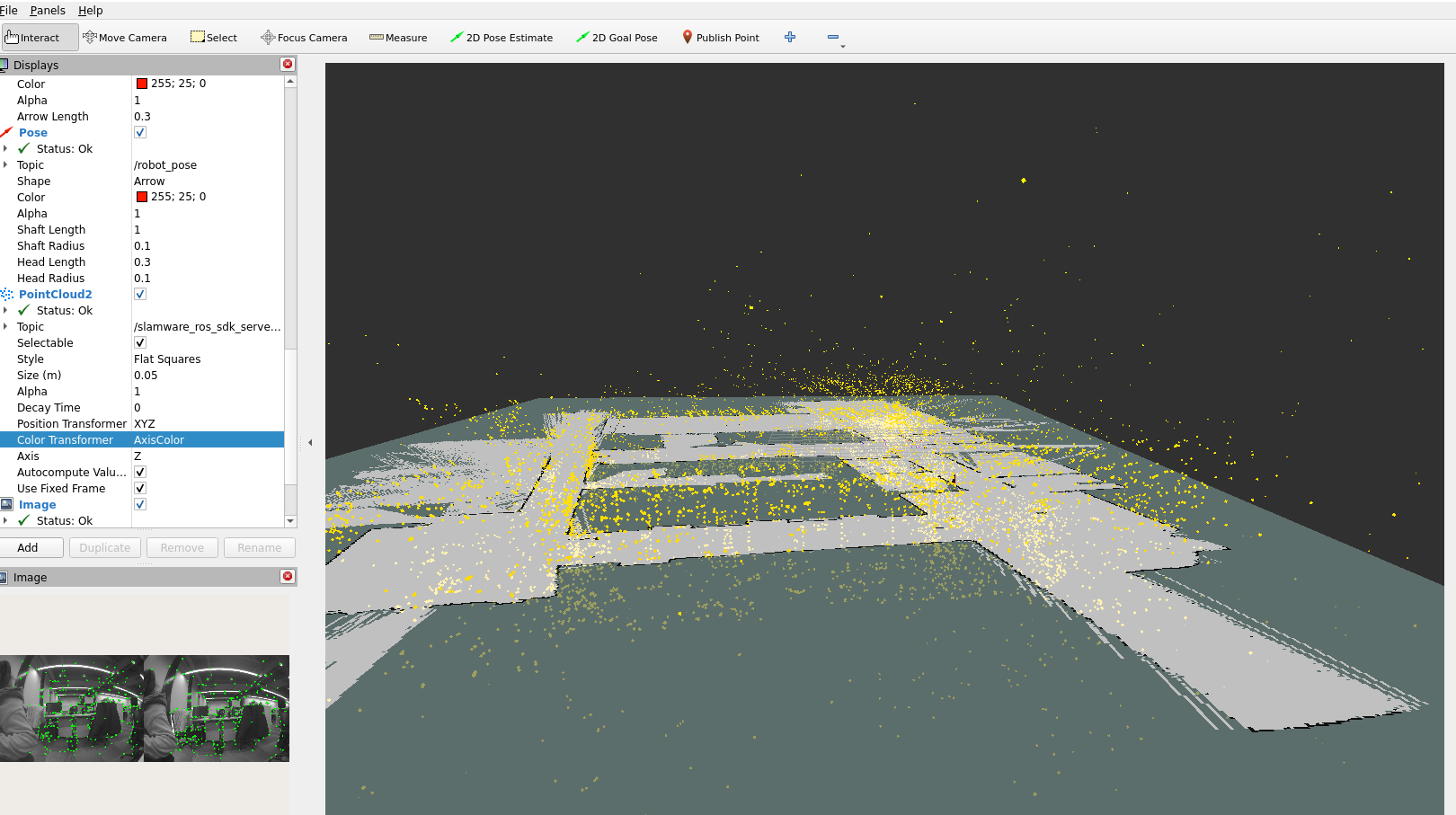
节点
| 节点 | 说明 |
|---|---|
| slamware_ros_sdk_server_node节点 | 发布地图、点云图像,当前位姿等信息 |