Welcome to Slamware ROS SDK
Slamware is an autonomous localization and navigation solution for mobile robots.
Get Started
Download and install SDK
Please visit Support and Download section at Slamtec official website to download proper ROS SDK and extract it to your disk.
Directory Structure
Slamware ROS SDK is composed of resources and codes might be required in the development of Slamware and ROS based applications, and organized as following:
| Directory | Description |
|---|---|
| docs | Reference documents |
| src | Source code |
| --slamware_ros_sdk | Source code of Slamware ROS SDK |
| --slamware_sdk | Headers and libraries of Slamware C++ SDK |
Development Environment
- Ubuntu 16.04 amd64
- ROS packages
Hardware Requirements
A Slamware-based mobile robot is required to use Slamware ROS SDK. It should be switched on and configured with proper IP address, which will be connected to from the slamware_ros_sdk_server_node ROS node.
Hello World
1. Create workspace
Put source code directory src into an empty workspace. Eg. catkin_ws, use catkin utility to initialize workspace
cd catkin_ws/src
catkin_init_workspace
2. Compile
cd ..
catkin_make
3. Setup workspace environment
source devel/setup.bash
4. Start node
Please connect to the WiFi hot spot provided by the mobile robot if it is configured in AP mode, and start ROS node:
roslaunch slamware_ros_sdk slamware_ros_sdk_server_node.launch ip_address:=192.168.11.1
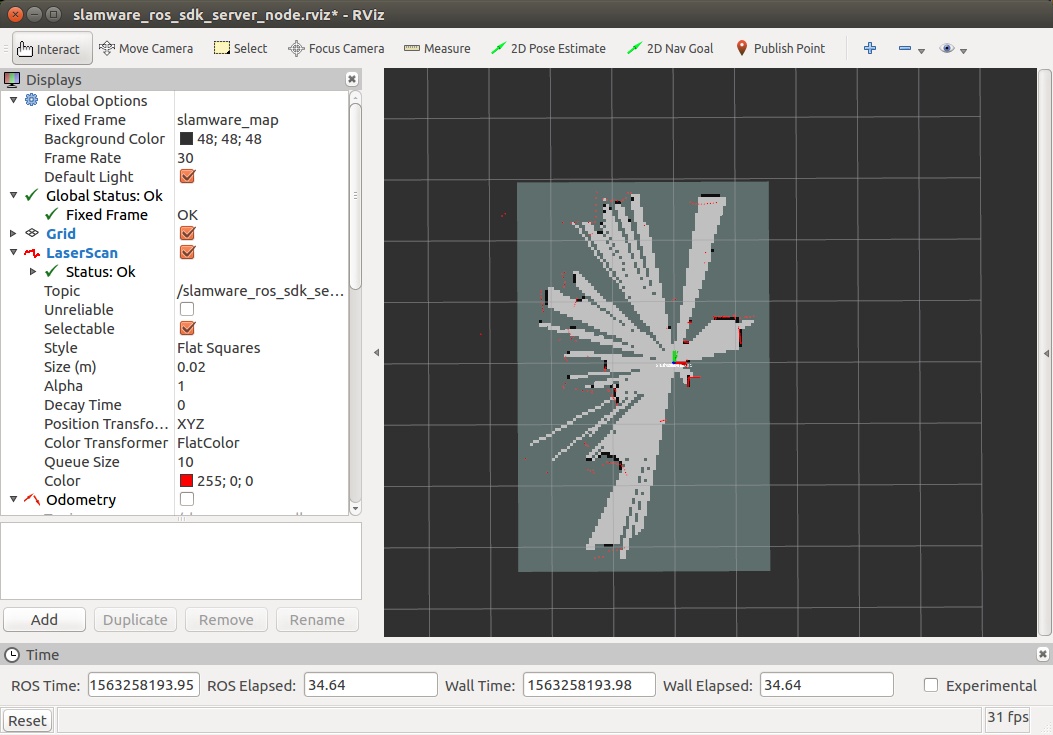
View by rviz
roslaunch slamware_ros_sdk view_slamware_ros_sdk_server_node.launch
Nodes
| Node | Comments |
|---|---|
| slamware_ros_sdk_server_node Node | Publish maps, robot pose and status, receives control commands |