Welcome to Aurora ROS2 SDK
Aurora is a newly developed integrated positioning and mapping sensor by SLAMTEC, which combines LiDAR, vision, inertial navigation, and deep learning technologies. This sensor requires no external dependencies and can provide six degrees of freedom (DOF) positioning capabilities with high-precision 3D mapping for both indoor and outdoor environments immediately after powering on..
Get Started
Download and install SDK
Please visit Support and Download section at Slamtec official website to download proper ROS2 SDK and extract it to your disk.
Directory Structure
The Aurora ROS2 SDK contains the resources and code you may need during your development process. The directory structure is organized as follows:
| Directory | Description |
|---|---|
| docs | Reference documents |
| src | Source code |
| --slamware_ros_sdk | Source code of Slamware ROS SDK |
| --aurora_remote_public | Aurora-related header files and libraries |
Development Environment
- The SDK is based on Ubuntu 20.04 / 22.04 operating systems and requires the installation of ROS2 packages.
Hardware Requirements
To use the ROS2 SDK, you will need a device based on Aurora spatial mapping. The device should be powered on and configured with an appropriate IP address. The slamware_ros_sdk_server_node will attempt to connect to this device once started.
Hello World
1. Create workspace
Place the src directory containing the source code into an empty workspace directory. For more details, refer to the official ROS2 workspace creation tutorial
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
2. Compile
cd ..
colcon build
3. Setup workspace environment
echo "source ~/ros2_ws/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
Since aurora_remote_public library is a dynamic library, you need to add the platform path to LD_LIBRARY_PATH. For example, if you place aurora_ros2_sdk_linux in the ~/ros2_ws/src folder, you need to add the following command to ~/.bashrc:
export LD_LIBRARY_PATH=~/ros2_ws/src/aurora_ros2_sdk_linux/src/aurora_remote_public/lib/linux_x86_64:$LD_LIBRARY_PATH
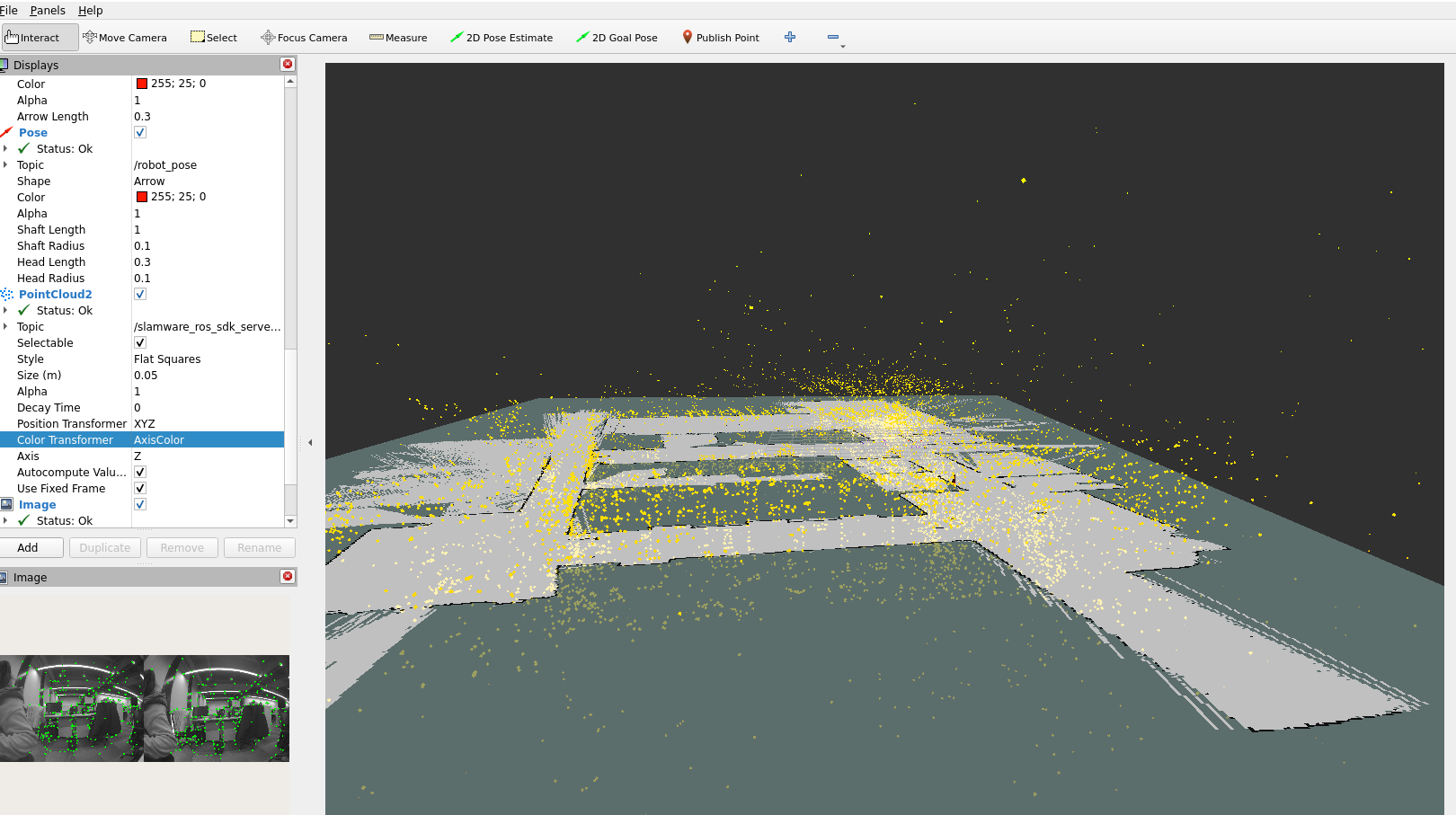
4. Launch the Node
If the Aurora device is in AP mode, connect to the Aurora Wi-Fi and launch the node.
ros2 launch slamware_ros_sdk slamware_ros_sdk_server_and_view.xml ip_address:=192.168.11.
Nodes
| Node | Comments |
|---|---|
| slamware_ros_sdk_server_node Node | Publish maps, robot pose and status, receives control commands |