Welcome to Aurora ROS SDK
Get Started
Download and install SDK
You can download the ROS SDK suitable for your platform from the Support and Download page on the Slamtec official website.
Alternatively, you can download the repository from GitHub.
Directory Structure
The Aurora ROS SDK contains the resources and code you may need during your development process. The directory structure is organized as follows:
| Directory | Description |
|---|---|
| docs | Reference documents |
| src | Source code |
| --slamware_ros_sdk | Source code of Slamware ROS SDK |
| --aurora_remote_public | Aurora-related header files and libraries |
Development Environment
- The SDK is based on Ubuntu 20.04 operating systems and requires the installation of ROS packages.
Hardware Requirements
To use the ROS SDK, you need an Aurora mapping device. Ensure it is powered on and configured with the appropriate IP address. The slamware_ros_sdk_server_node will attempt to connect to the device after being launched.
Usage Example
1.Download the source code:
git clone https://github.com/Slamtec/aurora_ros
2.Compile
cd aurora_ros
source /opt/ros/noetic/setup.bash
catkin_make
3.Launch the node If the Aurora device is in AP mode, connect to the Aurora hotspot.
Run the following command to launch the node:
source devel/setup.bash
roslaunch slamware_ros_sdk slamware_ros_sdk_server_and_view.launch ip_address:=192.168.11.1
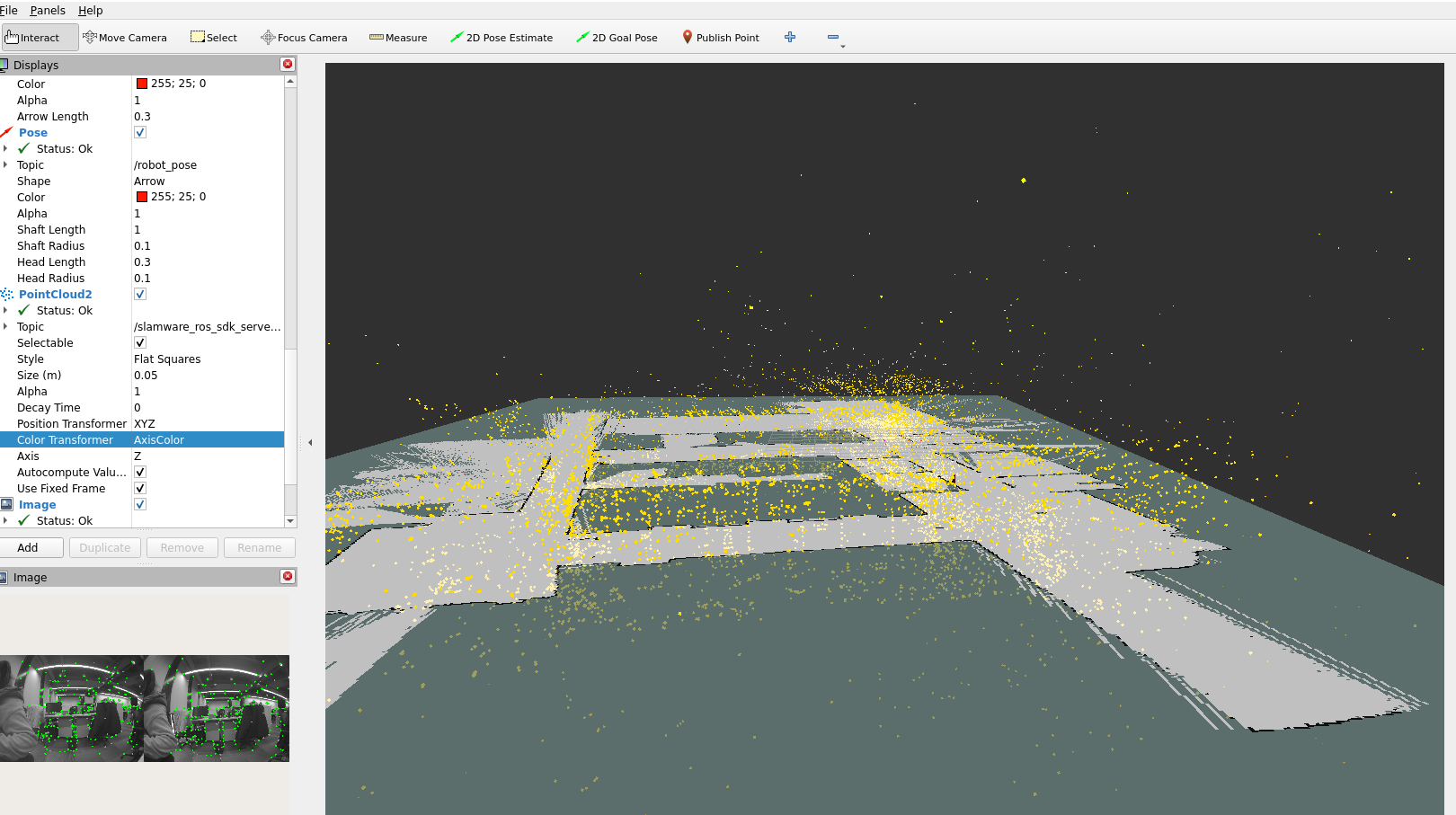
Nodes
| Node | Comments |
|---|---|
| slamware_ros_sdk_server_node Node | Publish maps, robot pose and status, receives control commands |